Périphériques de microcontrôleur
Qu’elle est la différence entre un microprocesseur et un microcontrôleur ? Lorsqu’on débute en électronique nous pourrions penser qu’il n’y en a pas. Cependant cette différence existe; elle réside dans les “périphériques”. Un microprocesseur ne gère que des instructions (code à exécuter) – c’est le bon vieux CPU de notre ordinateur portable ou de bureau. Un microcontrôleur est un microprocesseur + des périphériques, le tout dans le même composant. Pour un portable ou un ordinateur de bureau, les périphériques – tels que la RAM, le disque dur, le processeur graphique – sont séparés du microprocesseur (CPU). Le compromis entre flexibilité, taille, coût, et simplicité; le fait d’avoir des périphériques externes procure une grande flexibilité car, par exemple, vous pouvez facilement choisir différentes tailles et types de RAM, de disque dur ou de GPU; alors que tout regrouper dans un seul composant rend les choses plus compactes, rentables et simples – particulièrement lorsqu’on travaille sur des systèmes embarqués compacts.
Les fabricants de microcontrôleurs offrent habituellement une large gamme de microcontrôleurs avec une choix de taille mémoire et diverses options de périphériques, associé à un outil de recherche qui permet de déterminer le composant qui correspond aux fonctionnalités dont vous avez besoin. De quel périphériques parlons-nous?
La mémoire
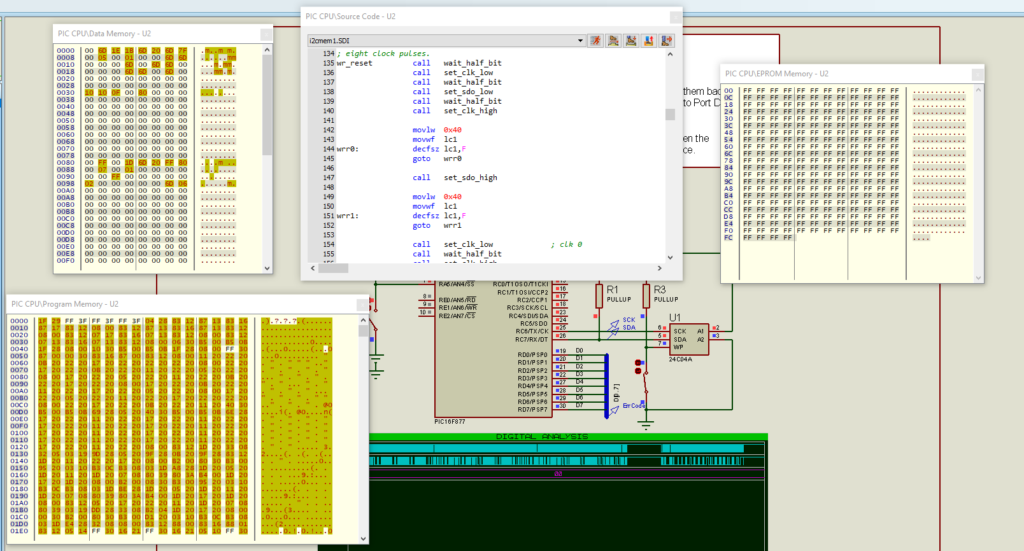
Communications
A ce stade il est bon de préciser que les périphériques sont des composants séparés du microprocesseur qui le déchargent de certaines tâches – le microprocesseur se contente de demander “merci de m’envoyer la donnée” et le périphérique de communication se charge des choses sérieuses. Cette manière de procéder permet au microprocesseur de s’occuper d’autres choses. Plusieurs périphériques peuvent opérer au même moment en parallèle, ce qui ne serait pas possible si le microprocesseur devait les gérer lui-même.
Timer et compteur
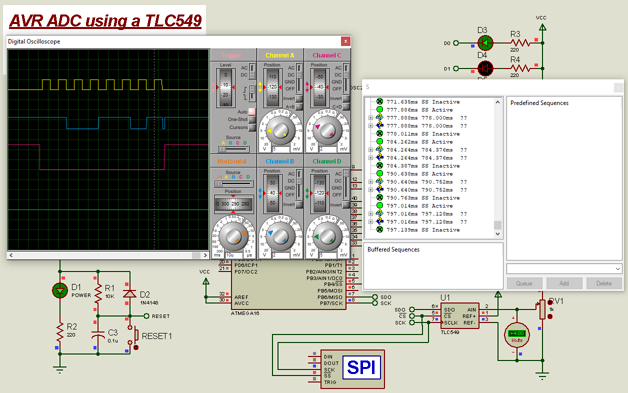
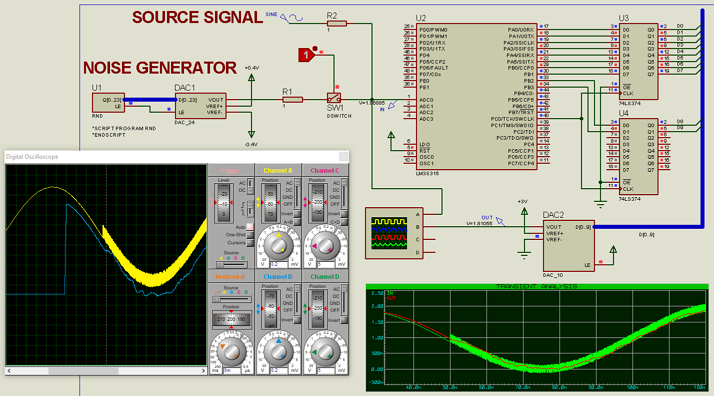
Convertisseur analogique-numérique
GPIO
Watchdog Timer
DMA
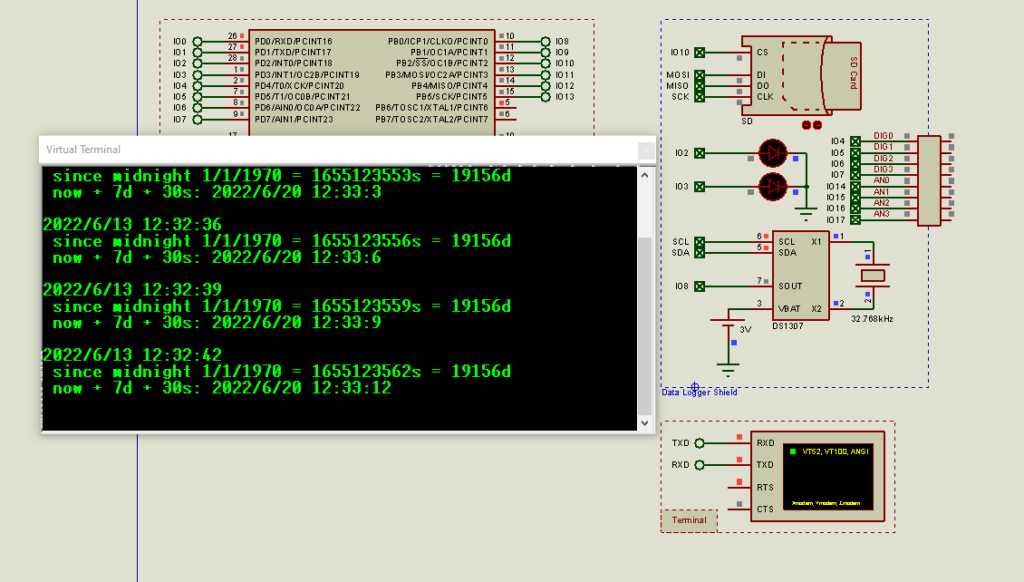
RTCC
Et beaucoup, beaucoup plus...
Périphériques externes
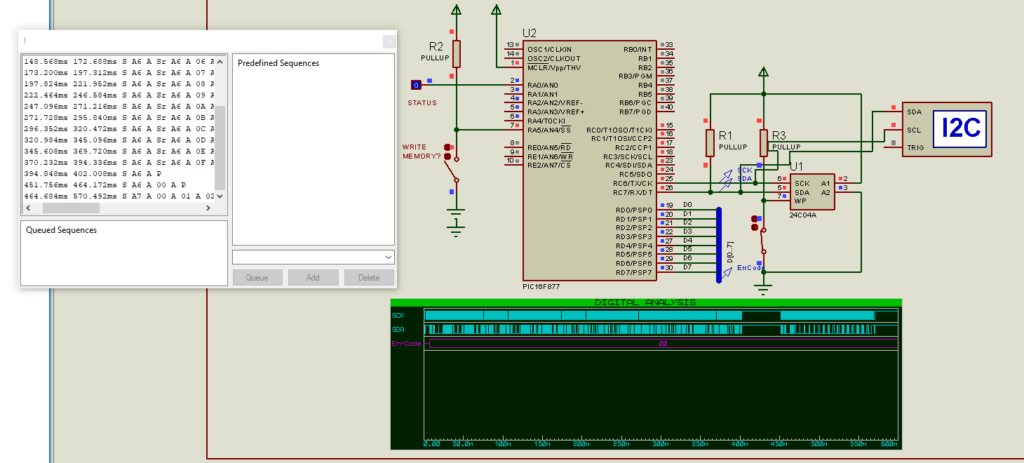
Simulation
Copyright Labcenter Electronics Ltd. 2024
Traduction française
Copyright Multipower France 2024