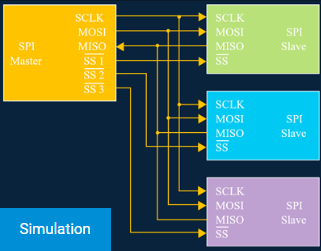
En pratique il est rare que des données soient à la fois transmises et reçues en même temps (le scénario habituel est qu’une instruction soit suivie d’une réponse, ou juste que le maître lise l’état de l’esclave). Cependant un des avantages du SPI est qu’il est simple à déboguer et dépanner (avec un oscilloscope par exemple) car on dispose de liens de communication dédiés. Les protocoles tels que I2C nécessitent moins de lignes mais sont plus difficiles à dépanner du fait leur complexité. Un autre avantage du SPI est que toutes les lignes de communication sont actives à l’état haut ou bas. Par opposition, par exemple, à l’I2C dont les liens de communication sont uniquement pilotées à l’état bas et des résistances de tirage sont utilisées pour les mettre à l’état haut lorsqu’elles ne sont pas actives (voir notre article sur le bus I2C). Comme les lignes sont toujours actives, cela signifie qu’il est possible d’obtenir des débits de données supérieurs. |